
海底冷泉探测你知多少?
2017年7月24日,我国新一代远洋综合科考船“科学”号搭载的“发现”号遥控无人潜水器在南海冷泉区下潜作业,目标是采集冷泉区生物,寻找冷泉喷口。那么,什么是海底冷泉?怎样寻找海底冷泉呢?
一、什么是海底冷泉?
冷泉是指来自海底沉积界面之下、以喷涌和渗漏方式注入盆地的低温流体,会产生一系列物理、化学和生物作用,这种现象及产物称为冷泉。海底冷泉主要是以水、碳氢化合物(天然气和石油)、硫化氢、细粒沉积物为主要成分,其温度与海水相近的流体,广泛发育于活动和被动大陆边缘斜坡海底。海底冷泉系统是继洋中脊热泉被发现和研究之后又一新的流体沉积领域,是上世纪海洋地质学领域最重要的成就之一。
人们发现,冷泉经常出现于天然气水合物矿藏的顶部,形成于特殊的海底地貌中(如麻坑和泥火山等),这些特征可以作为海底天然气水合物存在的有力证据。因此,天然气水合物的勘查往往通过识别和寻找现代(活动)冷泉。另外,在冷泉系统中,大量富碳氢化合物的流体通过海底冷泉系统释放到海水甚至大气中,引发了一系列重要的生物地球化学作用。通过对海底冷泉系统的深入研究,展现了更为细致的海底地形地貌,提升了人们对深海资源的认识和利用,拓展了深海环境下生命的潜在界线。此外,海底冷泉系统的相关研究是一个复杂的过程,往往与海底油气、天然气水合物以及深海生命过程密切相关。
二、怎样寻找海底冷泉?
近年来,以建设海洋强国为己任,瞄准国家对于海洋资源勘探开发的重大需求,青岛海洋地质研究所创新技术方法,自主研发了声学深拖系统、海底多参数原位观测系统等一系列深海探测高端仪器设备,为深海进入和深海探测提供了坚实的装备保障。在已完成的冷泉探测中,该所自主研发的深海探测设备与上海交通大学研制的遥控无人潜水器(Remote Operated Vehicle,简称ROV)以及中国海洋大学研制的水下激光拉曼一起发挥了重要作用(如图1)。
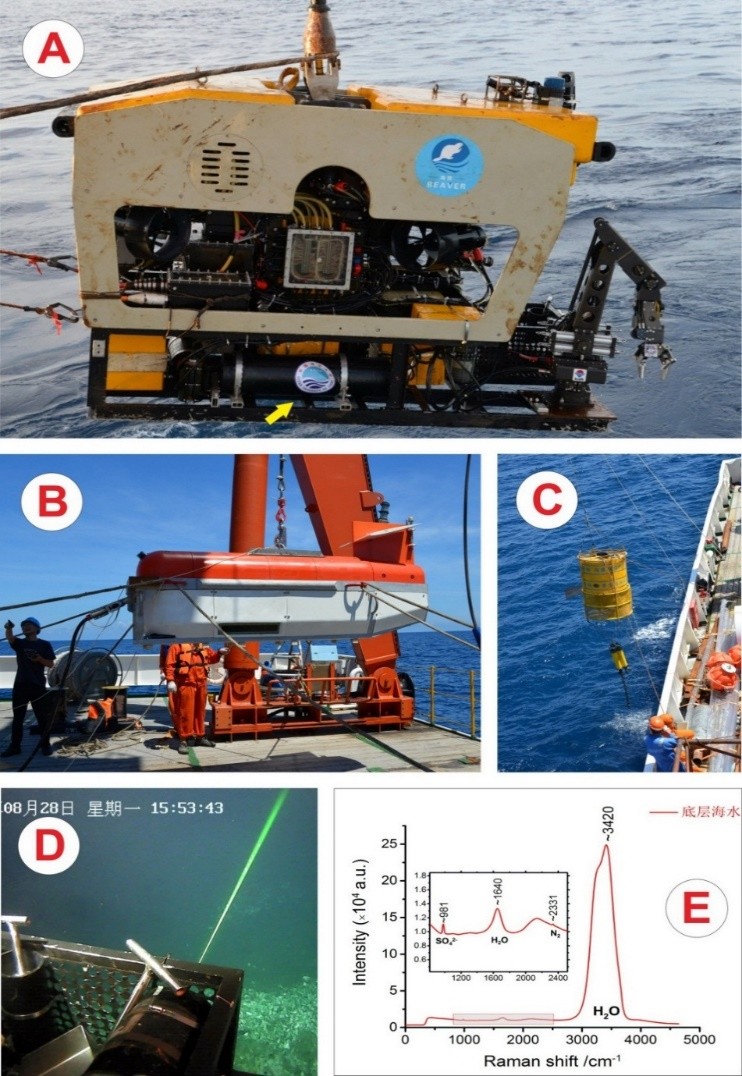
图1 海底冷泉探测用到的仪器设备
A. 上海交通大学研制的海狸号ROV(黄色箭头为中国海洋大学自研的水下激光拉曼仪);B. 青岛海洋地质研究所自研的声学深拖;C. 青岛海洋地质研究所自研的深海多参数原位观测系统;D.ROV搭载激光拉曼仪水下现场测试;E. 水下激光拉曼水下采集的现场数据。
海底冷泉探测犹如大海捞针,如何高效探测海底冷泉是世界性难题,要解决这一难题的关键是技术方法的进步。
青岛海洋地质研究所利用自主研发的声学深拖系统、海底多参数原位观测系统等一系列深海探测高端技术装备,集成创新了近海底“侧扫声呐探测-浅地层测量-多波束后散射反演”三维快速精准锁定海底冷泉目标的技术方法,建立了“ROV潜水器、海底摄像及原位取样、原位激光拉曼测试”三合一的冷泉精确探测系统,形成了一整套国际领先的深海探测技术体系,取得了技术装备上的重大突破。实践证明,这套探测系统锁定海底冷泉行之有效,勘查成功率高、找寻效率高、锁定目标精确。
天然气水合物泄漏产生的气泡和海水之间存在较大的声阻抗差异,声波在海水中传播遇到气泡时,会产生强烈的反射,通过船载多波束系统对水体的扫描,可以形成类似火焰的声学反射图像(如图2),据此实现海底冷泉羽状流的大面积快速识别。虽然船载多波束系统的探测效率很高,但定位精度存在一定误差,而且不是所有的火焰状反射都有冷泉,因此,在初步锁定冷泉位置后还需要进一步确认。
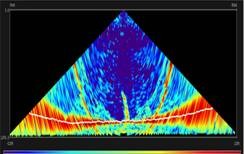

图2单次回波和沿航迹方向的羽状流水体声学异常
利用自主集成创新的声学深拖系统搭载了侧扫声呐、浅地层剖面和多波束测深单元,能够更加靠近海底进行探测,通过分析该系统获取的高分辨率侧扫反射图、海底地形图和浅地层剖面图(如图3),进而准确快速确定冷泉位置。
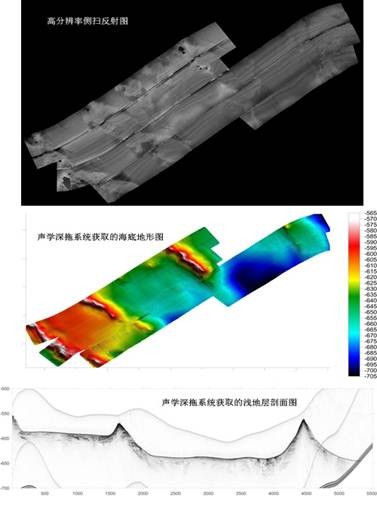
图3 自主集成创新的声学深拖系统获取的高分辨率侧扫反射图、海底地形图和浅地层剖面
利用ROV平台创新整合了适用冷泉精确探测的海底摄像、原位取样、原位测试的三合一系统,对发现的冷泉进行精细探测,现场观察描述冷泉系统区域面积、地形地貌、泄漏程度、沉积物与岩石形态、生物种类与数量等直观信息,同时进行影像采集,水下利用ROV搭载的原位测试进行现场流体成分等分析测试,ROV机械手臂采集流体、沉积物、岩石和生物样品,带回甲板进行甲板测试或初处理。
利用该体系可一次性获得多种资料和数据。如,利用多波束水体模块可获得气泡羽流的位置和相对强度;利用声学深拖,可同时获得靶点区地形地貌和浅地层剖面资料;利用海底多参数观测系统,可监测到冷泉区原位、实时、长期的通量和成分变化,为开展后续理论研究提供宝贵了的资料。
三、海底冷泉探测装备与技术的发展方向
各种水下工作平台设备是海底冷泉精细探测的必备装备。从国际视角上看,ROV在现代海底冷泉区的应用也已经是常态化,几乎全世界知名的冷泉区都曾经出现过ROV下潜调查研究的身影。ROV作为一种优良的作业平台,可以搭载诸如激光拉曼光谱原位定量探测装置,对以海底冷泉区为代表的各种活动生长系统进行溶解态甲烷、硫化氢、硫酸根和pH等各种地球化学参数的原位探测,极具应用前景。自主式水下机器人(Autonomous Underwater Vehicle,简称AUV)具有易于布放、续航时间长、速度快、精确定位和通信以及支持诸如摄像机、照相机,各种水下环境参数传感器以及其它地球物理设备的优势。我国自主研发的AUV已在西南印度洋热液区进行了成功实验应用(如图4)。2006年,美国在墨西哥湾北部利用AUV进行的海底冷泉区调查作业,效果良好并取得了重要发现。AUV的高效、无缆和强大的自主作业能力使得它可以在ROV作业前优先使用,因为这些ROV的高精定点作业获得大范围的海底底质和形貌信息,以更精确地完善和修改ROV站位布置和任务细化。载人深潜技术是深海技术的前沿与制高点,也是深海科考最先进的技术手段之一。海底冷泉赋存区的水深相对较浅,而且往往离陆地比较近,是载人深潜器进行海试以及科学应用的极佳场所。我国的蛟龙号就曾多次在我国的南海冷泉进行海试和试验性应用航次。2013年,“蛟龙”号试验性应用航次在南海实施,载人潜水器首次搜索观测到了面积约为2000平方米的由大量的毛瓷蟹、蜘蛛蟹、深海虾、贻贝等构成的冷泉生物群落。
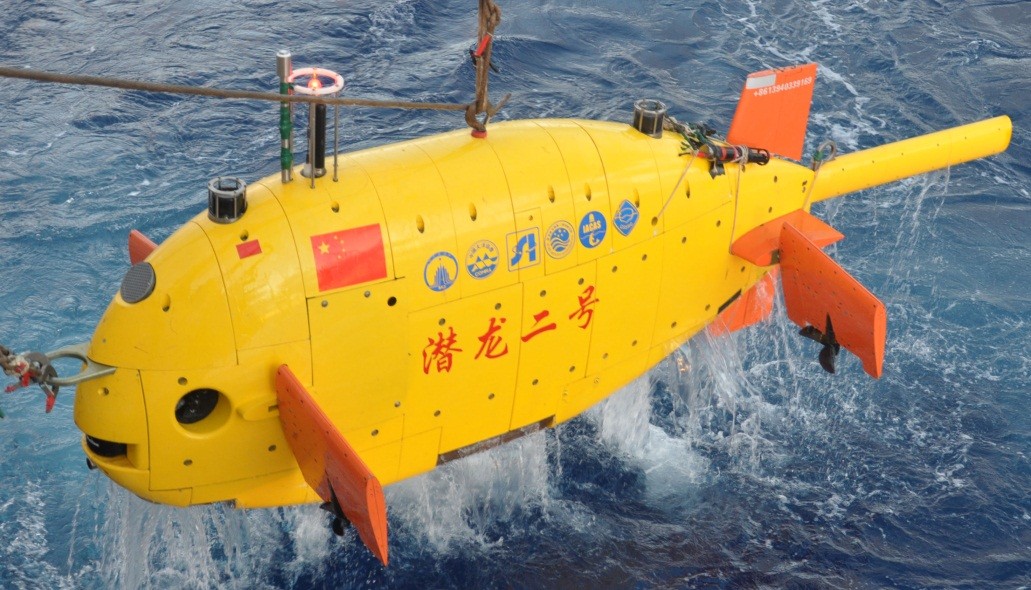
图4我国自主研发的AUV在西南印度洋作业
由于海底采集的冷泉流体和天然气水合物在随ROV或取样设备上升过程中会遭到海水污染或温度压力变化而发生气体扩散,这使原位测试的必要性凸显。利用ROV、AUV等平台搭载各类探头和传感器,实现冷泉区域各种原位实验测试是保证冷泉实验质量的最佳方法。
现场原位观测能直接反映海底冷泉的活动过程,特别是考虑到海底冷泉在不同时间尺度上均有明显变化。因此,加大现场原位观测设备的研制也是海底冷泉探测装备发展的重要方向。在过去的几十年里,浮标、锚系、ROV、AUV等技术装备加深了我们对深海的了解,但其仅能给我们提供较少时间段的现象和数据。而海底光缆的网络观测系统需要铺设深海海底通信电缆,其海底电缆建设投入及维护费用较高,并且一旦网络系统建设完毕,其结构是永久性的,无法移动到别的区域,制约了对新发现的海底热液活动区、天然气水合物区、深海油气开发区的观测研究。因此,深海海底界面座底式观测系统成为冷泉探测装备的热点。
近年来,欧洲共同体成员国和美国都大力研发座底式海底边界观测站,并取得了许多有关海底冷泉的重要发现。座底式海底边界观测站既可以实现不同水深、长期多参数综合观测,而且还具备可移动等特点,更适用于海底冷泉的长期监测、对比和综合分析,以满足海底冷泉研究需要。
海底冷泉探测不仅能为国家能源安全提供保障,而且有助于海洋探测装备与技术的快速发展,更能够彰显我国海洋科学研究的实力,助力加快建设海洋强国的中国梦。
(作者单位:中国地调局青岛海洋地质研究所)

 京公网安备 11010202007433号
京公网安备 11010202007433号